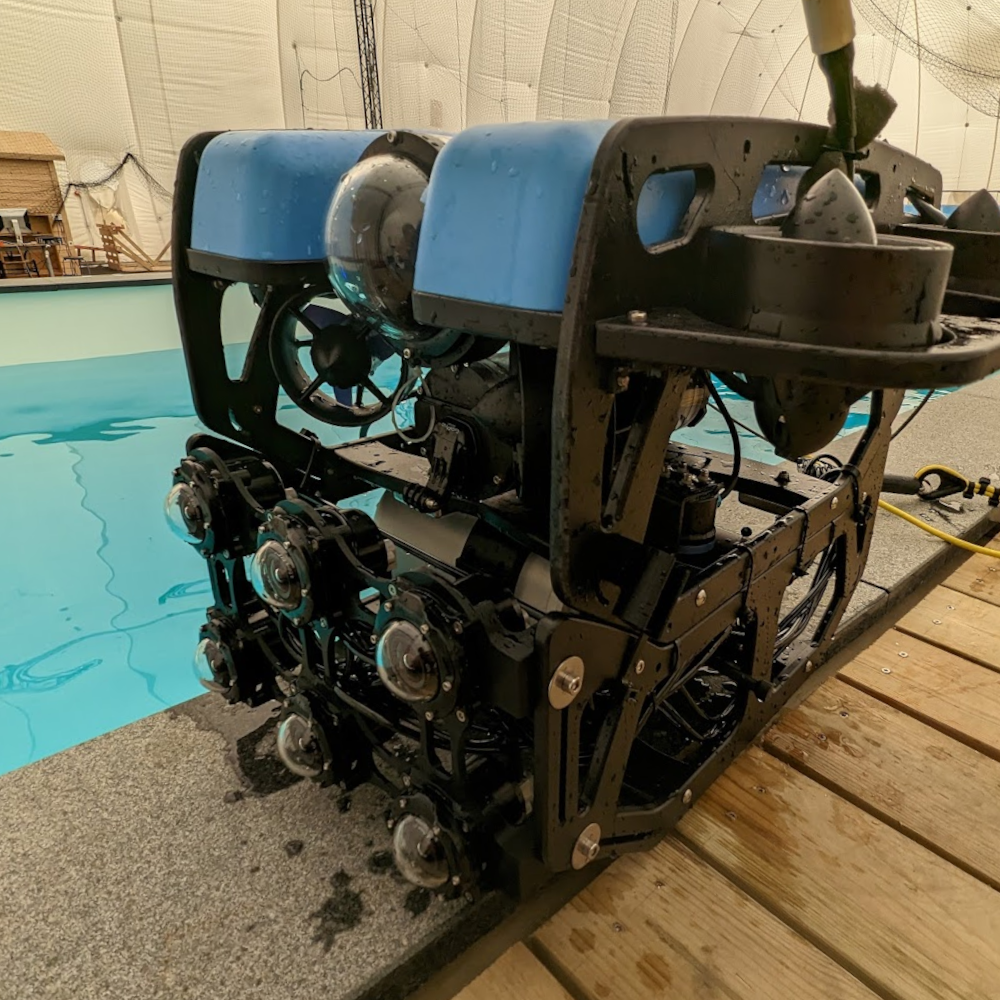
Whie working as a research assistant at DTU, I was tasked with developing a pipeline for 3D reconstruction of underwater scenes, using a newly acquired 6 camera multi camera system. I worked with this system for a while, first working with our technician to integrate it onto a BlueROV. I then developed a Graphical User Interface for it, to allow us and students to actually use the system, without having to know how to call ROS services.

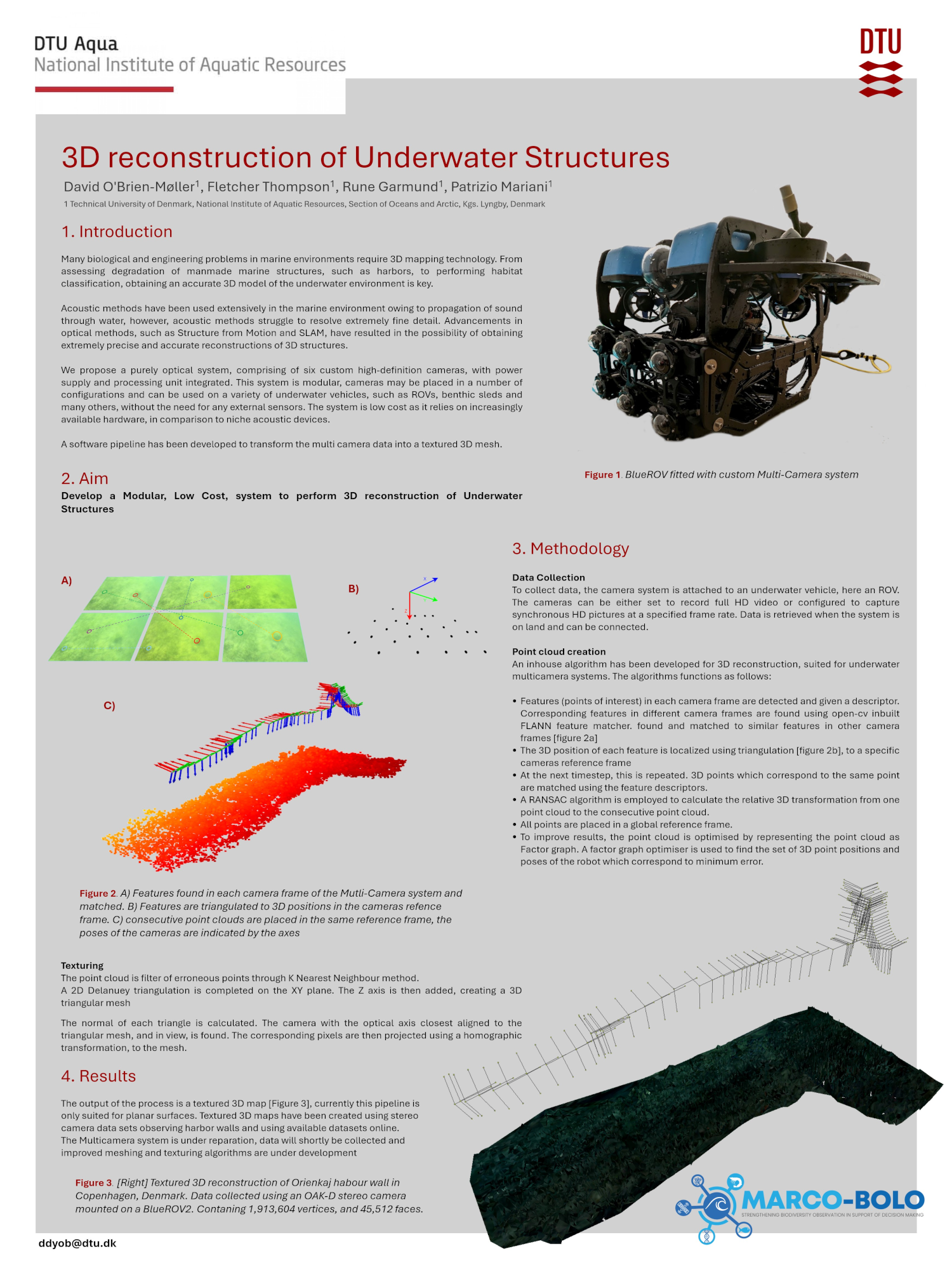
I spent a while working on a full pipeline to create 3D reconstructions of underwater scenes using data from a multi camera system DTU had purchesed. All as part of the EU Horizion MarcoBolo Project. I ended up writing a codebase in python that could reconstruct a scene using 1 -> N cameras. During the process of writing this, I learnt so much about computer vision, the challenges with underwater scenes, and working on a large code base. I pretty quickly realised that me by myself was unlikely to develop anything better than commercial solutions out there, but I got a lot out of the process, it definitely helped me teach computer vision to our Ocean Engineering Masters students who took the course "Fundamentals of Acoustics and Underwater Optical Systems", that I've been a teaching assistant on from 2022 onwards.
I worked with a masters student to calibrate the cameras, and go out and collect data in the waters around Copenhagen, and created a good few 3D scene reconstructions using Colmap and other programs. I was sorry to leave this project and start heading into my PhD all about Argo Floats (check out the other projects!), I was just getting into splatting and other state of the art 3D reconstruction methods. I'm hoping I'll come back to seabed / underwater scene reconstruction in the future. I attended a meeting for the project in January 2025 and presented our work and got to see what the other groups all working on biodiversity monitoring were up to. I think there's a lot of potential for 3D optical systems for seeing how marine eco systems are doing. It seems like a very low cost way of achieving some of the biodiversity monitoring requirements that are required when building any sort of offshore infrastrture, but also just gives you some really beautiful and cool results. I love when we can spot crabs and flatfish in our models after going around with our ROV, it's a non-instrusive way of getting a very good idea of what this underwater world actually looks like.